This is the latest
(unstable) version of this documentation, which may document features
not available in or compatible with released stable versions of Godot.
Checking the stable version of the documentation...
NavigationsAgents — це допоміжні вузли, які поєднують функціональні можливості для пошуку шляху, відстеження шляху та уникнення агента для Node2D/3D-спадкового батьківського вузла. Вони полегшують звичайні виклики API NavigationServer від імені батьківського вузла актора більш зручним способом для початківців.
2D і 3D версії NavigationAgents доступні як NavigationAgent2D і NavigationAgent3D відповідно.
Нові вузли NavigationAgent автоматично приєднаються до навігаційної карти за замовчуванням на World2D/World3D.
Вузли NavigationsAgent є необов’язковими та не є жорсткою вимогою для використання системи навігації. Усю їхню функціональність можна замінити сценаріями та прямими викликами API NavigationServer.
Після встановлення target_position для агента, наступну позицію на шляху можна отримати за допомогою функції get_next_path_position().
Після отримання наступної позиції на шляху перемістіть батьківський вузол актора агента до цієї позиції на шляху за допомогою власного коду переміщення.
Примітка
Навігаційна система ніколи не переміщує батьківський вузол NavigationAgent. Рух повністю в руках користувачів та їхніх власних сценаріїв.
NavigationAgents мають власну внутрішню логіку для продовження поточного шляху та виклику оновлень.
Функція get_next_path_position() відповідає за оновлення багатьох внутрішніх станів і властивостей агента. Функцію слід повторно викликати один раз кожен physics_process, поки is_navigation_finished() не повідомить, що шлях завершено. Функцію не слід викликати після досягнення цільової позиції або кінця шляху, оскільки це може викликати тремтіння агента на місці через повторне оновлення шляху. Завжди перевіряйте на початку сценарію за допомогою is_navigation_finished(), якщо шлях уже завершено.
Наступні властивості відстані впливають на поведінку проходження шляху.
На path_desired_distance від позиції наступного шляху агент переміщує свій внутрішній індекс шляху до наступної позиції шляху.
На target_desired_distance від позиції цільового шляху агент вважає цільову позицію досягнутою, а шлях — у кінці.
На path_max_distance від ідеального шляху до наступної позиції шляху агент запитує новий шлях, оскільки він був відсунутий занадто далеко.
Усі важливі оновлення запускаються за допомогою функції get_next_path_position() під час виклику _physics_process().
NavigationAgents можна використовувати з process, але вони все ще обмежені одним оновленням, яке відбувається в physics_process.
Приклади сценаріїв для різних вузлів, які зазвичай використовуються з NavigationAgents, можна знайти нижче.
Під час написання сценаріїв переміщення агента слід враховувати деякі поширені проблеми користувачів і важливі застереження.
Шлях повертається порожнім
Якщо агент запитує шлях до синхронізації навігаційної карти, напр. у функції _ready() шлях може повертатися порожнім. У цьому випадку функція get_next_path_position() поверне ту саму позицію, що й батьківський вузол агента, і агент вважатиме кінець шляху досягнутим. Це виправляється шляхом здійснення відкладеного виклику або використання зворотного виклику, наприклад. чекаю зміни сигналу навігаційної карти.
Агент застряг, танцюючи між двома позиціями
Це зазвичай спричинено дуже частими оновленнями шляху кожного окремого кадру, навмисно чи випадково (наприклад, максимальна відстань шляху встановлена занадто мало). Пошук шляху повинен знайти найближче положення, яке є дійсним у сітці навігації. Якщо новий шлях запитується в кожному окремому кадрі, перші позиції шляху можуть постійно перемикатися попереду та позаду поточної позиції агента, змушуючи його танцювати між двома позиціями.
Агент іноді повертається назад
Якщо агент рухається дуже швидко, він може перевершити перевірку path_desired_distance без жодного просування індексу шляху. Це може призвести до повернення агента до точки шляху, яка зараз знаходиться позаду нього, доки він не пройде перевірку відстані для збільшення індексу шляху. Збільшення бажаних відстаней відповідно до швидкості вашого агента та частоти оновлення зазвичай виправляє це, а також більш збалансований макет багатокутника навігаційної сітки з невеликою кількістю країв полігону, стиснутих разом у невеликих просторах.
Агент іноді дивиться назад у пошуках кадру
Так само, як із застряглими танцюючими агентами між двома позиціями, це зазвичай спричинено дуже частими оновленнями шляху кожного окремого кадру. Залежно від макета навігаційної сітки, особливо коли агент розміщено безпосередньо над краєм навігаційної сітки або з’єднанням країв, очікуйте, що позиції шляху іноді будуть трохи «позаду» поточної орієнтації ваших акторів. Це відбувається через проблеми з точністю, і цього не завжди можна уникнути. Зазвичай це лише видима проблема, якщо актори миттєво повертаються обличчям до поточної позиції шляху.
У цьому розділі пояснюється, як використовувати уникнення навігації, специфічне для NavigationAgents.
Щоб NavigationAgents могли використовувати функцію уникнення, властивість avoidance_enabled повинна бути встановлена на true.
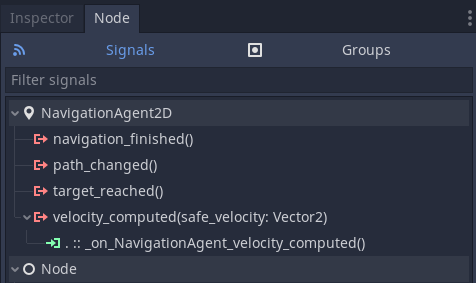
Сигнал velocity_computed вузла NavigationAgent має бути підключений, щоб отримати результат розрахунку безпечної швидкості.
Встановіть velocity вузла NavigationAgent у _physics_process(), щоб оновити агент до поточної швидкості батьківського вузла агента.
Якщо в агенті ввімкнено уникнення, вектор safe_velocity отримуватиметься разом із сигналом velocity_computed кожного кадру фізики. Цей вектор швидкості слід використовувати для переміщення батьківського вузла NavigationAgent, щоб уникнути зіткнення з іншими агентами або перешкодами для уникнення.
Примітка
Лише інші агенти на тій же карті, які самі зареєстровані для уникнення, враховуватимуться під час розрахунку уникнення.
Примітка
The NavigationAgent must be supplied with a target_position attribute,
even if you are only using the agent for avoidance. Otherwise, the safe_velocity
received from the velocity_computed signal will always be the zero vector.
Наступні властивості NavigationAgent є актуальними для уникнення:
Властивість висота доступна лише в 3D. Висота разом із поточним глобальним положенням агента по осі y визначає вертикальне розташування агента в симуляції уникнення. Агенти, які використовують 2D-уникнення, автоматично ігноруватимуть інших агентів або перешкоди, які знаходяться під або над ними.
Властивість radius контролює розмір кола уникнення або, у випадку тривимірної сфери, навколо агента. Ця область описує тіло агента, а не дистанцію маневру для уникнення.
Властивість neighbor_distance контролює радіус пошуку агента під час пошуку інших агентів, яких слід уникати. Менше значення зменшує вартість обробки.
Властивість max_neighbors контролює кількість інших агентів, які враховуються в обчисленні уникнення, якщо всі вони мають радіус перекриття. Нижче значення зменшує вартість обробки, але занадто низьке значення може призвести до того, що агенти ігноруватимуть уникнення.
Властивості time_horizon_agents і time_horizon_obstacles контролюють час передбачення уникнення для інших агентів або перешкод у секундах. Коли агенти обчислюють свої безпечні швидкості, вони вибирають швидкості, які можуть зберігатися протягом цієї кількості секунд без зіткнення з іншим об’єктом уникнення. Час передбачення має бути якомога меншим, оскільки агенти сповільнюватимуть свої швидкості, щоб уникнути зіткнення за цей час.
Властивість max_speed контролює максимальну швидкість, дозволену для розрахунку уникнення агентів. Якщо батьки-агенти рухаються швидше, ніж це значення, уникнення safe_velocity може бути недостатньо точним, щоб уникнути зіткнення.
Властивість use_3d_avoidance перемикає агента між 2D уникненням (вісь xz) та 3D уникненням (вісь xyz) під час наступного оновлення. Зверніть увагу, що 2D уникнення та 3D уникнення виконуються в окремих симуляціях уникнення, тому агенти, розділені між ними, не впливають один на одного.
Властивості avoidance_layers і avoidance_mask є бітовими масками, подібними до, наприклад, шари фізики. Агенти уникатимуть лише інших об’єктів уникнення, які знаходяться на шарі уникнення, який відповідає принаймні одному з їхніх власних бітів маски уникнення.
avoidance_priority змушує агентів з вищим пріоритетом ігнорувати агентів з нижчим пріоритетом. Це можна використовувати, щоб надати певним агентам більшої важливості в симуляції уникнення, наприклад. важливі неігрові персонажі, без постійної зміни їхніх шарів уникнення або маски.
Уникнення існує у власному просторі й не має інформації від навігаційних сіток або фізичних зіткнень. Агенти уникнення за кадром — це просто кола з різним радіусом на плоскій 2D-площині або сфери в порожньому 3D-просторі. NavigationObstacles можна використовувати для додавання деяких обмежень середовища до симуляції уникнення, див. Використання навігаційних перешкод.
Примітка
Уникнення не впливає на пошук шляху. Його слід розглядати як додаткову опцію для постійно рухомих об’єктів, які не можна (повторно) запекти до навігаційної сітки, щоб ефективно рухатися навколо них.
Примітка
Уникнення RVO робить неявні припущення щодо поведінки природного агента. наприклад що агенти рухаються розумними обхідними сторонами, які можуть бути призначені, коли вони стикаються один з одним. Це означає, що дуже клінічні сценарії тестування на уникнення зазвичай не вдаються. наприклад агенти, які рухаються прямо один проти одного з ідеально протилежними швидкостями, зазнають невдачі, тому що агенти не можуть отримати призначення своїх сторін повз.
Використання властивості avoidance_enabled NavigationAgent є кращим варіантом для перемикання уникнення. Наведені нижче фрагменти коду можна використовувати для перемикання уникнення для агентів, створення або видалення зворотних викликів уникнення або перемикання режимів уникнення.
У наступних розділах наведено шаблони сценаріїв для вузлів, які зазвичай використовуються з NavigationAgents.
extendsNode2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")varmovement_delta:floatfunc_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnmovement_delta=movement_speed*deltavarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_deltaifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2)->void:global_position=global_position.move_toward(global_position+safe_velocity,movement_delta)
extendsCharacterBody2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2):velocity=safe_velocitymove_and_slide()
extendsRigidBody2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2):linear_velocity=safe_velocity
usingGodot;publicpartialclassMyNode2D:Node2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;privatefloat_movementDelta;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}_movementDelta=MovementSpeed*(float)delta;Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*_movementDelta;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){GlobalPosition=GlobalPosition.MoveToward(GlobalPosition+safeVelocity,_movementDelta);}}
usingGodot;publicpartialclassMyCharacterBody2D:CharacterBody2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){Velocity=safeVelocity;MoveAndSlide();}}
usingGodot;publicpartialclassMyRigidBody2D:RigidBody2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){LinearVelocity=safeVelocity;}}
extendsNode3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")varphysics_delta:floatfunc_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Save the delta for use in _on_velocity_computed.physics_delta=delta# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3)->void:global_position=global_position.move_toward(global_position+safe_velocity,physics_delta*movement_speed)
extendsCharacterBody3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3):velocity=safe_velocitymove_and_slide()
extendsRigidBody3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3):linear_velocity=safe_velocity
usingGodot;publicpartialclassMyNode3D:Node3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;privatefloat_movementDelta;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}_movementDelta=MovementSpeed*(float)delta;Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*_movementDelta;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){GlobalPosition=GlobalPosition.MoveToward(GlobalPosition+safeVelocity,_movementDelta);}}
usingGodot;publicpartialclassMyCharacterBody3D:CharacterBody3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){Velocity=safeVelocity;MoveAndSlide();}}
usingGodot;publicpartialclassMyRigidBody3D:RigidBody3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){LinearVelocity=safeVelocity;}}