Camera3D
被繼承: XRCamera3D
相機節點,會從某個角度進行顯示。
說明
Camera3D 是一個特殊節點,用於顯示從其目前位置可見的內容。相機在最近的 Viewport 節點中註冊自己(當樹上行)。每個視口中只能有一個啟動的相機。如果在樹上沒有可用的視口,相機將在全域視口中註冊。換句話說,相機只是用來為 Viewport 提供 3D 顯示能力的,如果沒有,則在該 Viewport(或更高層視口)中註冊的場景無法顯示。
教學
屬性
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
方法
void |
clear_current(enable_next: bool = true) |
get_camera_projection() const |
|
get_camera_rid() const |
|
get_camera_transform() const |
|
get_cull_mask_value(layer_number: int) const |
|
get_frustum() const |
|
is_position_behind(world_point: Vector3) const |
|
is_position_in_frustum(world_point: Vector3) const |
|
void |
|
project_local_ray_normal(screen_point: Vector2) const |
|
project_position(screen_point: Vector2, z_depth: float) const |
|
project_ray_normal(screen_point: Vector2) const |
|
project_ray_origin(screen_point: Vector2) const |
|
void |
set_cull_mask_value(layer_number: int, value: bool) |
void |
set_frustum(size: float, offset: Vector2, z_near: float, z_far: float) |
void |
set_orthogonal(size: float, z_near: float, z_far: float) |
void |
set_perspective(fov: float, z_near: float, z_far: float) |
unproject_position(world_point: Vector3) const |
列舉
enum ProjectionType: 🔗
ProjectionType PROJECTION_PERSPECTIVE = 0
透視投影。物體距離相機螢幕越遠顯示就越小。
ProjectionType PROJECTION_ORTHOGONAL = 1
正交投影,又稱正交投影。物體無論距離多遠,在螢幕上都保持相同的大小。
ProjectionType PROJECTION_FRUSTUM = 2
視錐投影。通過該模式可以調整 frustum_offset 來建立“傾斜的視錐”效果。
enum KeepAspect: 🔗
KeepAspect KEEP_WIDTH = 0
保留水平長寬比,也稱為 Vert- 縮放。這通常是在縱向模式下運作的專案的最佳選擇,因為較高的縱橫比將從更寬的垂直視場中受益。
KeepAspect KEEP_HEIGHT = 1
保留垂直長寬比,也稱為 Hor+ 縮放。這通常是在橫向模式下運作的專案的最佳選擇,因為較寬的縱橫比會自動從較寬的水平視場中受益。
enum DopplerTracking: 🔗
DopplerTracking DOPPLER_TRACKING_DISABLED = 0
禁用多普勒效應模擬(預設)。
DopplerTracking DOPPLER_TRACKING_IDLE_STEP = 1
通過追蹤在 _process 中改變的物體位置來類比多普勒效應。與這些物體相比,該相機的相對速度的變化會影響音訊的感知方式(改變音訊的 AudioStreamPlayer3D.pitch_scale)。
DopplerTracking DOPPLER_TRACKING_PHYSICS_STEP = 2
通過追蹤在 _process 中改變的物體位置來類比多普勒效應。與這些物體相比,該相機的相對速度的變化會影響音訊的感知方式(改變音訊的 AudioStreamPlayer3D.pitch_scale)。
屬性說明
CameraAttributes attributes 🔗
void set_attributes(value: CameraAttributes)
CameraAttributes get_attributes()
該相機所使用的 CameraAttributes。
Compositor compositor 🔗
void set_compositor(value: Compositor)
Compositor get_compositor()
The Compositor to use for this camera.
剔除遮罩,描述該相機算繪了哪些 VisualInstance3D.layers。預設情況下,20 個使用者可見層全都被算繪。
注意:由於 cull_mask 允許總共儲存 32 個層,因此另外 12 個層僅供引擎內部使用,不會在編輯器中公開。使用腳本設定 cull_mask 允許你切換那些保留層,這對編輯器外掛程式很有用。
要使用腳本更輕鬆地調整 cull_mask,請使用 get_cull_mask_value() 和 set_cull_mask_value()。
注意:VoxelGI、SDFGI 和 LightmapGI 將始終考慮所有層以確定對全域光照有貢獻的內容。如果這是一個問題,請將網格的 GeometryInstance3D.gi_mode 設定為 GeometryInstance3D.GI_MODE_DISABLED,並將燈光的 Light3D.light_bake_mode 設定為 Light3D.BAKE_DISABLED,以將它們從全域光照中排除。
如果為 true,則祖級 Viewport 正在使用這個相機。
如果場景中有多個相機,總會有一個被設為目前相機。例如,假設場景中存在兩個 Camera3D 節點並且只有一個為目前相機,那麼如果把某一個相機的 current 設為 false 就會導致另一個相機被設為目前相機。
DopplerTracking doppler_tracking = 0 🔗
void set_doppler_tracking(value: DopplerTracking)
DopplerTracking get_doppler_tracking()
If not DOPPLER_TRACKING_DISABLED, this camera will simulate the Doppler effect for objects changed in particular _process methods.
Note: The Doppler effect will only be heard on AudioStreamPlayer3Ds if AudioStreamPlayer3D.doppler_tracking is not set to AudioStreamPlayer3D.DOPPLER_TRACKING_DISABLED.
Environment environment 🔗
void set_environment(value: Environment)
Environment get_environment()
此相機要使用的 Environment。
該相機相對於其局部 Z 軸到遠剔除邊界的距離。較高的值允許相機看得更遠,而減少 far 如果會導致物件被部分或完全剔除,則可以提高性能。
The camera's field of view angle (in degrees). Only applicable in perspective mode. Since keep_aspect locks one axis, fov sets the other axis' field of view angle.
For reference, the default vertical field of view value (75.0) is equivalent to a horizontal FOV of:
~91.31 degrees in a 4:3 viewport
~101.67 degrees in a 16:10 viewport
~107.51 degrees in a 16:9 viewport
~121.63 degrees in a 21:9 viewport
Vector2 frustum_offset = Vector2(0, 0) 🔗
相機的視錐偏移。可以更改預設值,以建立如 Y-shearing 一樣的“傾斜的視錐”效果。
注意:僅在 projection 為 PROJECTION_FRUSTUM 時有效。
相機視口的水平(X)偏移量。
KeepAspect keep_aspect = 1 🔗
void set_keep_aspect_mode(value: KeepAspect)
KeepAspect get_keep_aspect_mode()
在 fov/size 調整時要鎖定的軸。可以是 KEEP_WIDTH 或 KEEP_HEIGHT。
該相機相對於其局部 Z 軸到近剔除邊界的距離。較低的值允許相機看到更靠近其原點的物件,但代價是整個範圍內的精度較低。低於預設值的值會導致 Z 衝突增加。
ProjectionType projection = 0 🔗
void set_projection(value: ProjectionType)
ProjectionType get_projection()
相機的投影模式。在 PROJECTION_PERSPECTIVE 模式下,物體與相機局部空間的Z距離會影響其感知的大小。
該相機的大小,單位為米,描述的是完整的寬度或者高度,取決於 keep_aspect。僅適用於正交和視錐模式。
相機視口的垂直(Y)偏移量。
方法說明
void clear_current(enable_next: bool = true) 🔗
如果這是目前相機,則將其從目前相機中移除。如果 enable_next 為 true,則請求使下一個相機(如果有)成為目前相機。
Projection get_camera_projection() const 🔗
返回該相機用於算繪至關聯視口的投影矩陣。相機必須是場景樹的一部分才能正常工作。
從 RenderingServer 返回該相機的 RID。
Transform3D get_camera_transform() const 🔗
返回該相機的變換,該變換會加上垂直(v_offset)和水平(h_offset)偏移;以及 XRCamera3D 等子類別相機對相機位置和方向所做的任何其他調整。
bool get_cull_mask_value(layer_number: int) const 🔗
返回是否啟用了 cull_mask 的指定層,該層由一個介於 1 和 20 之間的給定 layer_number 指定。
Array[Plane] get_frustum() const 🔗
以世界空間單位將相機的視錐平面作為 Plane 陣列按以下順序返回:near、far、left、top、right、bottom。不要與 frustum_offset 混淆。
返回包含該相機視錐的錐體形狀的 RID,忽略相機的近處平面。錐體的尖端代表該相機的位置。
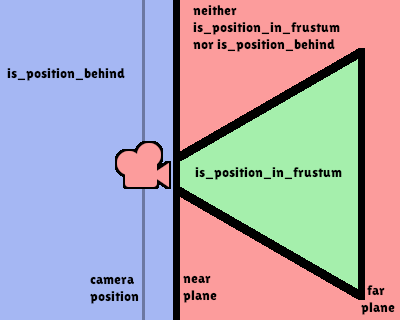
bool is_position_behind(world_point: Vector3) const 🔗
如果給定位置在相機後面(連結圖的藍色部分),則返回 true。查看此圖以瞭解位置查詢方法的概述。
{kind=link}
注意:返回 false 的位置可能仍然在相機的視野之外。
bool is_position_in_frustum(world_point: Vector3) const 🔗
如果給定位置在相機的視錐內(位於連結圖中的綠色部分),則返回 true。查看此圖以瞭解位置查詢方法的概述。
void make_current() 🔗
使此相機成為 Viewport 的目前相機(見類的說明)。如果相機節點在場景樹之外,一旦新增,它將嘗試成為目前相機。
Vector3 project_local_ray_normal(screen_point: Vector2) const 🔗
返回從螢幕點位置沿相機方向的法向量。正交相機會被正規化。透視相機考慮到透視、螢幕寬度/高度等因素。
Vector3 project_position(screen_point: Vector2, z_depth: float) const 🔗
返回世界空間中的 3D 點,該點對應到平面上 Viewport 矩形中的給定 2D 座標,該平面是距相機到場景的給定 z_depth 距離。
Vector3 project_ray_normal(screen_point: Vector2) const 🔗
返回世界空間中的法線向量,即通過逆相機投影將點投影到 Viewport 矩形上的結果。這對於以(原點,法線)的形式投射光線,以進行物件相交或拾取很有用。
Vector3 project_ray_origin(screen_point: Vector2) const 🔗
返回世界空間中的 3D 位置,即通過逆相機投影將點投影到 Viewport 矩形上的結果。這對於以(原點,法線)的形式投射光線,以進行物件相交或拾取很有用。
void set_cull_mask_value(layer_number: int, value: bool) 🔗
基於 value,啟用或禁用 cull_mask 中的指定層,該層由一個介於 1 和 20 之間的給定 layer_number 指定。
void set_frustum(size: float, offset: Vector2, z_near: float, z_far: float) 🔗
通過指定的以世界空間單位為單位的 size、offset、以及 z_near 和 z_far 裁剪平面,將相機投影設定為視錐模式(見 PROJECTION_FRUSTUM)。另見 frustum_offset。
void set_orthogonal(size: float, z_near: float, z_far: float) 🔗
Sets the camera projection to orthogonal mode (see PROJECTION_ORTHOGONAL), by specifying a size, and the z_near and z_far clip planes in world space units.
As a hint, 3D games that look 2D often use this projection, with size specified in pixels.
void set_perspective(fov: float, z_near: float, z_far: float) 🔗
通過指定的以度為單位的 fov(視野)角度,以及以世界空間單位為單位的 z_near 和 z_far 裁剪平面,將相機投影設定為透視模式(參見 PROJECTION_PERSPECTIVE)。
Vector2 unproject_position(world_point: Vector3) const 🔗
返回對應到世界空間中給定 3D 點的 Viewport 矩形中的 2D 座標。
注意:當使用它在 3D 視口上定位 GUI 元素時,如果 3D 點在相機後面,請使用 is_position_behind() 來防止它們出現:
# 該程式碼塊是從 Node3D 繼承的腳本的一部分。
# `control` 是對從 Control 繼承的節點的引用。
control.visible = not get_viewport().get_camera_3d().is_position_behind(global_transform.origin)
control.position = get_viewport().get_camera_3d().unproject_position(global_transform.origin)