This is the latest
(unstable) version of this documentation, which may document features
not available in or compatible with released stable versions of Godot.
Checking the stable version of the documentation...
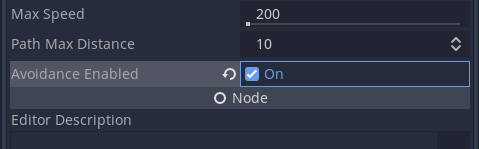
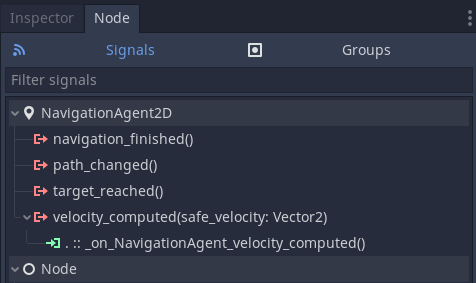
The NavigationAgent must be supplied with a target_position attribute,
even if you are only using the agent for avoidance. Otherwise, the safe_velocity
received from the velocity_computed signal will always be the zero vector.
下列 NavigationAgent 屬性與迴避有關:
height 屬性僅供 3D 使用。高度結合代理體目前全域 y 軸位置,決定代理體在迴避模擬中的垂直層級。使用 2D 迴避時,會自動忽略高於或低於自身的其他代理體或障礙。
extendsNode2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")varmovement_delta:floatfunc_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnmovement_delta=movement_speed*deltavarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_deltaifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2)->void:global_position=global_position.move_toward(global_position+safe_velocity,movement_delta)
extendsCharacterBody2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2):velocity=safe_velocitymove_and_slide()
extendsRigidBody2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2):linear_velocity=safe_velocity
usingGodot;publicpartialclassMyNode2D:Node2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;privatefloat_movementDelta;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}_movementDelta=MovementSpeed*(float)delta;Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*_movementDelta;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){GlobalPosition=GlobalPosition.MoveToward(GlobalPosition+safeVelocity,_movementDelta);}}
usingGodot;publicpartialclassMyCharacterBody2D:CharacterBody2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){Velocity=safeVelocity;MoveAndSlide();}}
usingGodot;publicpartialclassMyRigidBody2D:RigidBody2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){LinearVelocity=safeVelocity;}}
extendsNode3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")varphysics_delta:floatfunc_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Save the delta for use in _on_velocity_computed.physics_delta=delta# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3)->void:global_position=global_position.move_toward(global_position+safe_velocity,physics_delta*movement_speed)
extendsCharacterBody3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3):velocity=safe_velocitymove_and_slide()
extendsRigidBody3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3):linear_velocity=safe_velocity
usingGodot;publicpartialclassMyNode3D:Node3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;privatefloat_movementDelta;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}_movementDelta=MovementSpeed*(float)delta;Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*_movementDelta;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){GlobalPosition=GlobalPosition.MoveToward(GlobalPosition+safeVelocity,_movementDelta);}}
usingGodot;publicpartialclassMyCharacterBody3D:CharacterBody3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){Velocity=safeVelocity;MoveAndSlide();}}
usingGodot;publicpartialclassMyRigidBody3D:RigidBody3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){LinearVelocity=safeVelocity;}}